Raspberry Pico
Ejemplos de Raspberry Pi Pico en MicroPython
En este documento se presentan algunos ejemplos de cómo utilizar la placa Raspberry Pi Pico con MicroPython.
Salida y entradas de señales analógicas y digitales
ejemplo 1: encender un led
Este ejemplo describe cómo encender un LED que parpadea cada segundo utilizando una placa de desarrollo con MicroPython y el siguiente circuito conectado al pin 20:
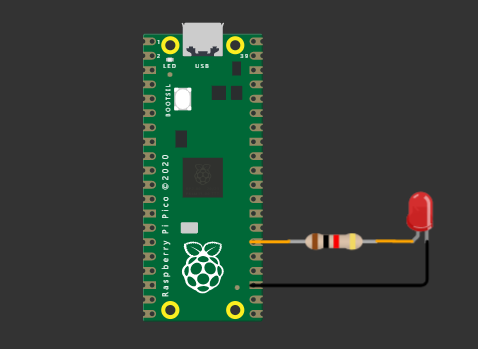
Para este ejemplo, es necesario conectar el cátodo del LED al pin 20 de la placa y el ánodo del LED a tierra. Una vez que se ha establecido la conexión, se puede utilizar el siguiente código para hacer parpadear el LED:
from machine import Pin
import utime
led = Pin(20, Pin.OUT)
while True:
led.toggle()
utime.sleep(1)
encuentra la simulación aquí.
ejemplo 2: lectura de boton
Este ejemplo describe cómo leer el estado de un botón utilizando una placa de desarrollo con MicroPython y el siguiente circuito conectado al pin 18:
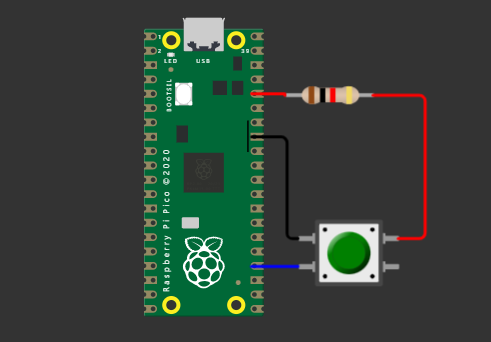
Para este ejemplo, es necesario conectar un extremo del botón al pin 18 de la placa y el otro extremo del botón a tierra. Una vez que se ha establecido la conexión, se puede utilizar el siguiente código para leer el estado del botón:
import machine
import utime
button = machine.Pin(18, machine.Pin.IN, machine.Pin.PULL_UP)
while True:
print(button.value())
utime.sleep(1)
if button.value() == 0:
print("El botón está presionado")
else:
print("El botón está suelto")
encuentra la simulación aquí.
ejemplo 3: lectura de una señal anloga ADC
Para leer el valor de un sensor analógico conectado a la placa Pico en el pin 26 como se ve en el circuito:
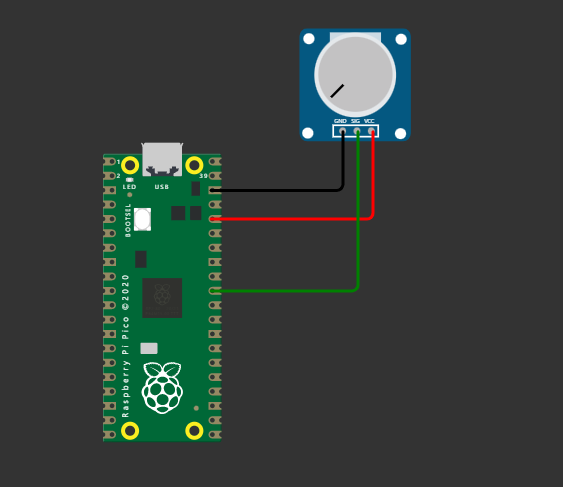
Para este ejemplo, donde tenemos conectado un potenciómetro, es necesario conectar los extremos al ánodo y cátodo respectivamente, y el centro del potenciómetro a una entrada ADC de la placa, que en este caso es el 26. Finalmente, se debe utilizar el siguiente código.
import machine
import utime
sensor = machine.ADC(26)
while True:
valor = sensor.read_u16()
print("valor: ", valor)
utime.sleep_ms(200)
encuentra la simulación aquí.
Señales PWM
Para el control de una señal PWM vamos necesitamos conectar un led con una resistencia al pin 18 de la placa como en el siguiente circuito:
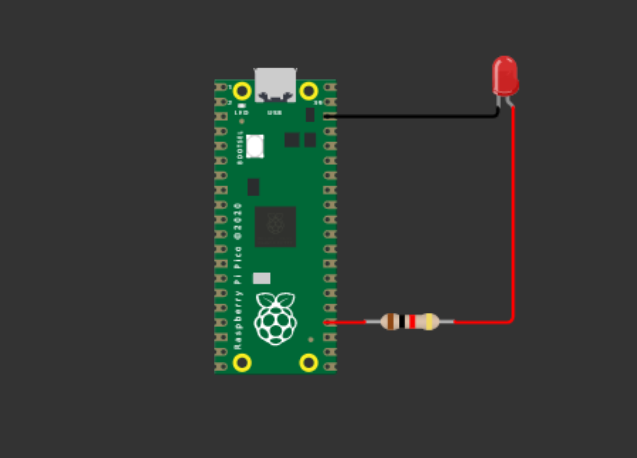
despues podemos varia la salida de coltaje de la placa utilizando el siguiente código:
import machine
import time
led_pin = machine.Pin(18)
led_pwm = machine.PWM(led_pin)
while True:
time.sleep(2)
for duty_cycle in range(0, 65535, 100):
led_pwm.duty_u16(duty_cycle)
print("valor:", duty_cycle)
time.sleep(0.007)
time.sleep(2)
for duty_cycle in range(65535, 0, -100):
led_pwm.duty_u16(duty_cycle)
print("valor:", duty_cycle)
time.sleep(0.007)
encuentra la simulación aquí.
Controlar un servo motor
Para controlar un servo motor conectado a la placa Pico en el pin 22 para controlar su posición mediante MicroPython.
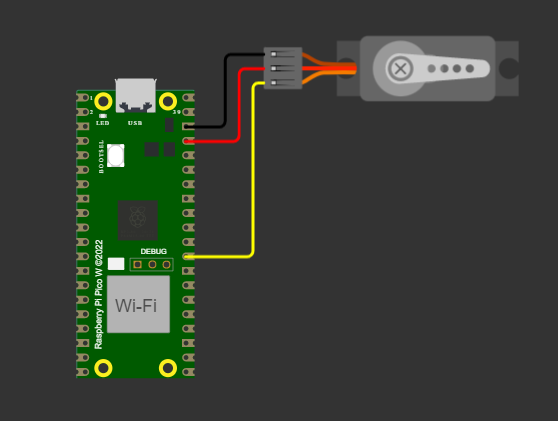
El circuito consiste en conectar la señal del servomotor al pin 22 de la placa, el pin positivo al pin de 5V y el pin negativo al pin de tierra. El código necesario para establecer la posición del servomotor en un ángulo específico es el siguiente:
import machine
import utime
servo_pin = machine.Pin(22, machine.Pin.OUT)
servo_pwm = machine.PWM(servo_pin, freq=50)
def set_servo_angle(angle):
duty = int((angle / 180) * 65000) + 2500
servo_pwm.duty_u16(duty)
while True:
for angle in range(0, 181, 10):
set_servo_angle(angle)
utime.sleep_ms(100)
encuentra la simulación aquí.
Estos son solo algunos ejemplos de cómo utilizar la placa Raspberry Pi Pico con MicroPython. Esperamos que esta documentación te haya sido útil y que puedas utilizarla como base para crear tus propios proyectos. Si tienes alguna duda o consulta, no dudes en consultarlo en la comunidad o foro correspondiente. ¡Que tengas éxito en tus proyectos!